Dean Silvester 经常被问到哪一个比较好。Dean Silvester 使用这两个设备,是因为在某些时候分别需要这两种类型的信息。
我使用83/200khz传感器作为我的标准声纳。我喜欢把它设置在200,根据水的透明度,氧气的水平和其他一些因素,自动灵敏度为+2。这是我的搜索工具,我在船上以相对快一点的怠速使用这个工具,使用一个带有Insight Genesis地图的分屏幕和标准声纳屏幕,在下降点和点周围偏量,搜索鱼、鱼饵群或结构。

Dean Silvester 经常被问到哪一个比较好。Dean Silvester 使用这两个设备,是因为在某些时候分别需要这两种类型的信息。
我使用83/200khz传感器作为我的标准声纳。我喜欢把它设置在200,根据水的透明度,氧气的水平和其他一些因素,自动灵敏度为+2。这是我的搜索工具,我在船上以相对快一点的怠速使用这个工具,使用一个带有Insight Genesis地图的分屏幕和标准声纳屏幕,在下降点和点周围偏量,搜索鱼、鱼饵群或结构。
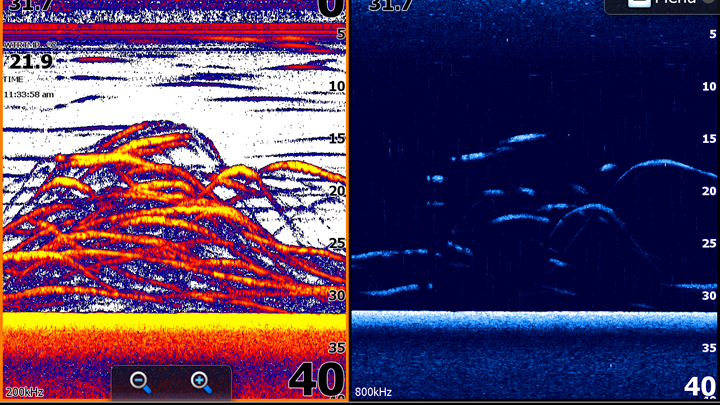
一旦我找到一个我感兴趣的区域,我会放慢速度,并在这个区域进行游行以确定附近的情况。一旦找到鱼,我会使用标准声纳来帮助我了解鱼的状况以及数量,我经常能够分辨出质量 -鱼中央的黄色越浓,鱼通常就越大,如果你有一条鱼,两条鱼或三条鱼在3-5英尺的范围内活动,你就知道它们是可以捕到的。如果有更多的线路,而且它们相对平行,并且分组紧密,那么可以假定无法进行钓鱼。
在标准声纳上,黄腹鱼、鲈鱼和鲶鱼在色谱和强度上表现出明显的差异。在比赛中这对我来说是非常重要的信息。鲶鱼通常会紧紧地粘在一起,这样看起来好像它们几乎是同步的,鱼线很细且紧密地串在一起,它们会受到传感器脉冲的刺激然后上升至船下。我需要尽快确定鱼的种类,以免浪费宝贵的时间。


一旦我发现一个我想进一步检查的集中目标,我会将声纳和结构扫描进行分屏,然后继续周围的测探。使用StructureScan,我现在可以确定鱼的结构有多紧密,底部的组成是什么样子,以及清楚地识别底部的结构项目。
















