为什么我需要声呐?声呐的工作原理
使用声呐,您可以重点关注鱼群出没及躲藏区域,如岩石、峭壁、沟渠、树木、原木等。如果没有声呐,您无法探知鱼群出没地,也不知道它们的躲藏地点,捕鱼就变得更困难了。

什么是传感器?
传感器通常安装在船上的横框上、船体内部(突出船体或穿过船体)或安装在拖拽电推上,将声纳信号 (PING) 传输到水层中,并接收来自这些传输的回声。

CHIRP 声呐
使用 Lowrance CHIRP,可以更清晰地看到鱼群、结构和船底,即使目标接近船底或密集地漂浮,也能提供为以其中某条鱼为目标的最佳视图。
用 FISH REVEAL 做 DOWNSCAN
DownScan Imaging™ 更易判断鱼群与结构的相对位置,为船下岩石、树木、船底结构和其他水下结构提供如照片画质般的影像。FishReveal™ 从 下扫成像获取高分辨率图像,并将图像与目标分离并与 CHIRP 声呐的传统声呐符号相结合,让探鱼变得更容易。

侧扫 - ACTIVE IMAGING
侧扫非常适合在大面积区域内搜索鱼群结构,它可以在船的每侧提供高达 600 英尺的视图,使您能够在较短的时间内覆盖更多的水域,并且可以查看相对太浅的区域,例如靠近海岸或河岸的区域。Active Imaging 3 合 1 带来了我们最流行的声呐——Lowrance CHIRP、侧扫和 DownScan Imaging™ ——共同组成传感器。

可观察深度 - ACTIVETARGET 动态 SONAR
查看船只前方发生了什么。ActiveTarget 动态声呐可以生成高分辨率影像,方便您查看鱼群在结构周围的游动情况以及对鱼饵的反应。通过实时观察鱼的结构和对鱼饵的反应,您可以快速进行调整,并且一击即中。ActiveTarget 还提供向下和侦查视图。

STRUCTURESCAN 3D
获取鱼群、结构和海底地形的真实三维视图,让您更容易了解鱼群和结构相对于船只的位置。

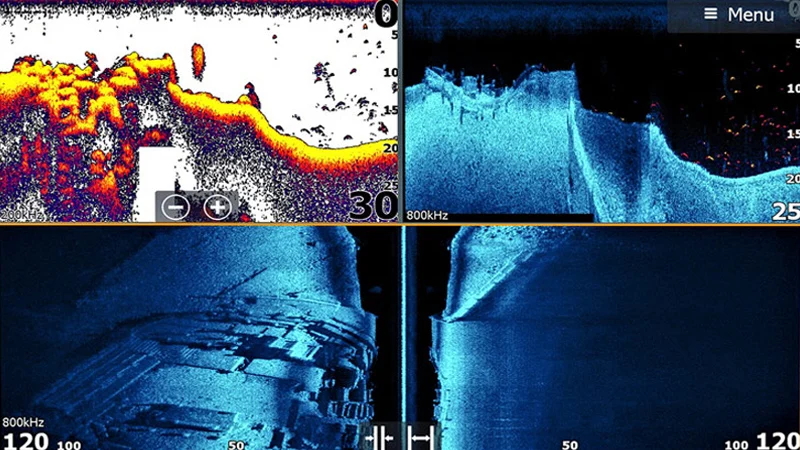
SCANNING SONAR
SCANNING SONAR 以 455 kHz 或 800 kHz 的频率发射,为船侧 (SideScan) 和船底 (DownScan Imaging) 提供高分辨率视图。800 kHz 在较浅的水域提供了最清晰的分辨率,而 455 kHz 声呐提供了最佳的整体图像质量和穿透深度。

HDI
HDI 是一种传感器,它结合了传统的圆形声呐元件和 DownScan 杆。

单元件传感器
带有单元件的传感器能够传输两个交变频率。例如,Lowrance Skimmer 可以传输 83 和 200 kHz 频率或中高频 CHIRP。

多元件传感器
工作原理类似单元件传感器,但由几个(有时许多)元件。这使得它们能够更快地上下回应,从而提高了信噪比,并因大型单元件更为精细而更为强劲。
声呐的工作原理
声呐通过在水下发送信号 (ping) 并接收其回声,来探测水深和水中物体的存在/深度。当原始信号从船底和隐藏在传感器与底部之间水层中的物体反弹时,会产生回波。对于鱼类探测,声呐会根据鱼和船的运动,将鱼显示为拱形、部分拱形或直线。

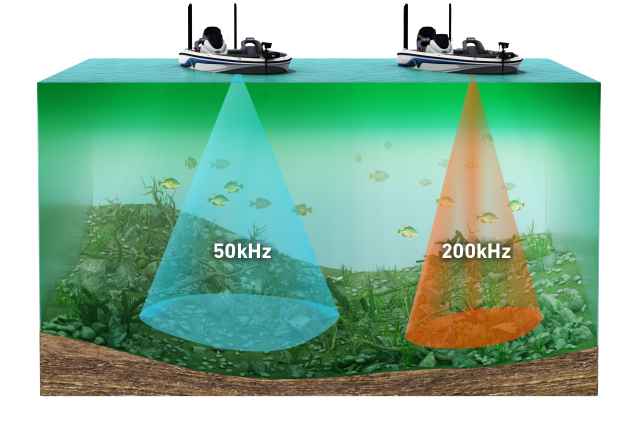
BROADBAND
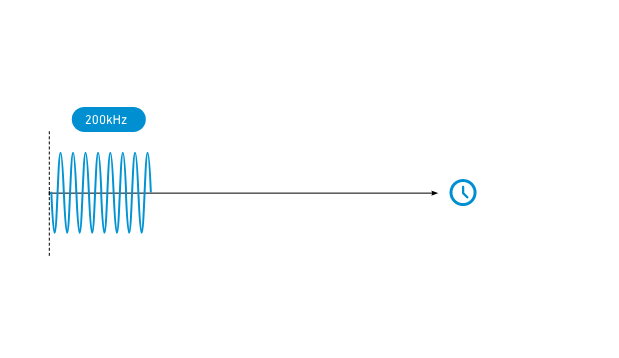
宽频声呐不是一种新颖的技术,它以 200 kHz、83 kHz 或 50 kHz的频率发送单频声呐信号 (ping)。高频 (200 kHz) 产生最佳分辨率,而低频 (50 kHz) 可以抵达更大的深度。
CHIRP
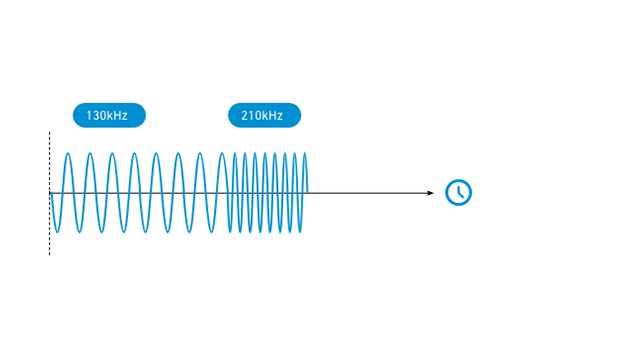
通过连续扫描频率范围(通常为 28 - 51 kHz(低)、85 - 155 kHz(中)或 140 - 250 kHz(高))提供更高分辨率的视图,从而为水层底部和其中的物体创建更完整的图像。
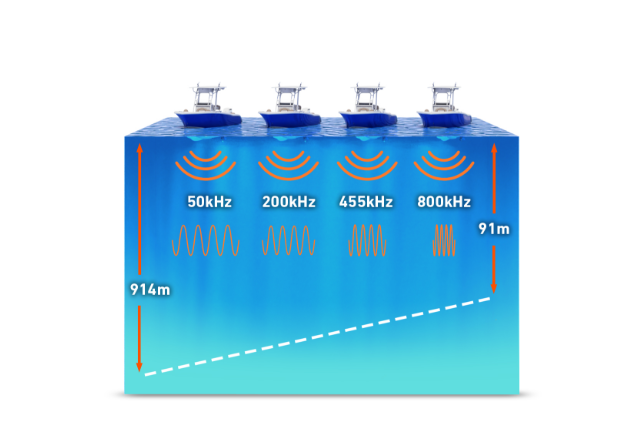
波束角
传统的声呐以圆锥形发射声波。光束的角度和圆锥的大小取决于传感器输出的频率。圆锥大小决定了在任意给定时间,能看到多少水体,角度越大,面积越大。
例如,大多数传统的 200 khz 传感器的锥角小于 20 度。如果在不到 10 英尺的水里捕鱼,底部的圆锥直径将小于 3 英尺,这就降低了鱼群在这个深度进入射程的可能性。因此,作为一个大致的向导方式,波束角越宽,分辨率就越低。
频率的重要性
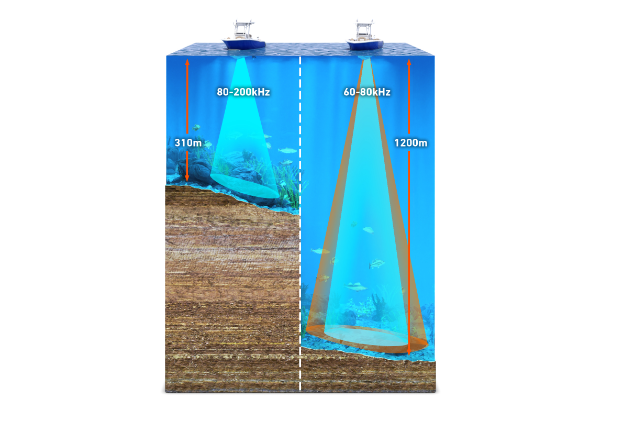
对于浅水区,需要中高频传感器(约 80 和 200 kHz)。高频能产生更高分辨率的图像,但不能深入水体深处。对于深海捕鱼,您需要一个低频传感器(大约 50 kHz)
有些传感器可以同时使用多个频率或范围,您可同时这两种传感器。
选择合适的传感器
有这么多不同类型的传感器,选择正确产品似乎是一个艰难的选择。本图将帮您在类型广泛的设备中,确定在 Lowrance 系列中,最适合您船只的产品,并为特定传感器解决方案提供选择方向。无论您是鱼塘、湖泊、沿海地区还是近海,我们都能提供声呐技术,帮您找到更多的鱼。
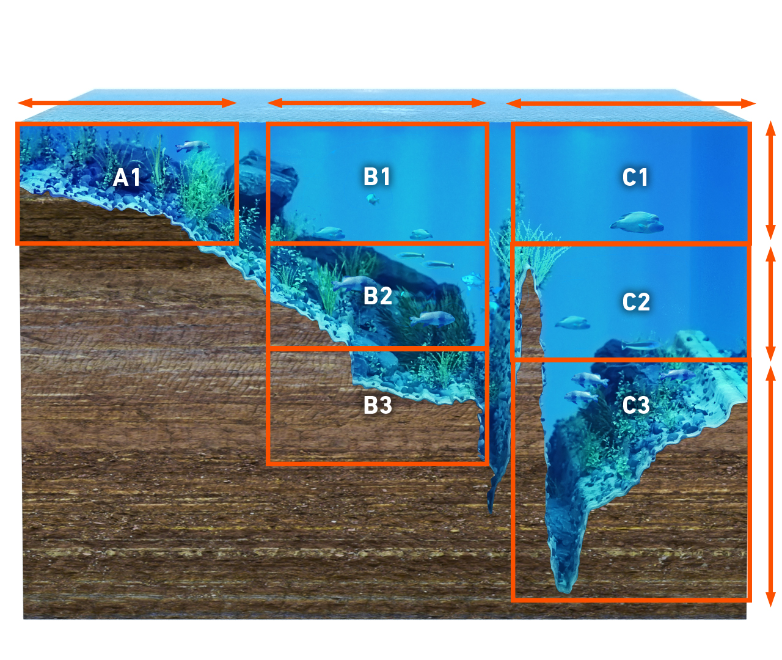
图 A1 和 B1 中需要使用 High Chirp、宽波束和 300 w 或 600 w 功率;C1 中,除了 1 kw 功率外,其他要求均相同。B2、C2、B3 和 C3是低频 (Lowest Chirp),都需要一个窄波束和最小 1 KW 的功率。
安装传感器
![]()
安装传感器
Lowrance 解决方案提供了可安装在各种类型船只和大多数皮划艇的传感器。安装位置因船的类型而异。
![]()
横梁安装式传感器
这是最常见的传感器安装方法之一,安装在横框上的传感器通常采用 Skimmer 设计,当船只航行时,允许水流经过传感器表面。

横梁安装小贴士
在横框上安装传感器时,首先在船体上安装一个塑料板。这不仅可以防止您直接在横梁上钻孔,还可以改善流经传感器的水流
![]()
拖拽电推
许多 Lowrance 传感器可以通过专门为传感器设计的支架安装在拖拽电推上。其他传感器可以使用一个标准拖拽电推支架进行安装。
![]()
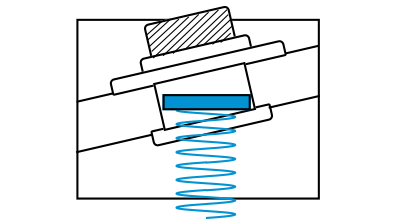
突出-贯穿船体式安装
在突出-贯穿船体式传感器的安装中,传感器被环氧树脂固定在玻璃纤维船的地板上,通过船体底部进行传输。
![]()
贯穿船体式安装
安装贯穿船体式传感器时,通过船底的孔安装传感器。
![]()
整流罩块
整流罩块被切割以匹配船体的死角,与传感器一起安装,以确保水流顺利流过贯穿船体传感器。
死角
对于 V 形船体,死角是船体相对于船龙骨下水平面的角度。鉴于大多数船体都有某种死角,必须将传感器与死角对齐,以便波束垂直向下发射,这使得声呐波束能够有效地探查海/湖/河床,确保传感器能够接收到反射信号。

传感器知识

基本连接
安装大多数 Lowrance 探鱼器/海图仪时,传感器可以直接连接到显示屏。包括 ActiveTarget 动态声呐和 StructureScan 3D 等声呐技术包含一个模块,将显示器与传感器连接起来。
最受欢迎页面
在我们网站上,查看最受欢迎页面,了解更多海图仪和探鱼器的相关信息。